Elektronisches Stabilitätsprogramm ESP
Auf dem weiten weg der Entwicklung aktiver Sicherheitssystems war die
Einführung des Elektronischen Stabilitätsprogramm ESP für Pkw im Jahr 1995 ein
wichtiger Meilenstein.
Die Funktionsanforderungen an ESP für Nfz gehen weit über die von ESP an
Pkw hinaus. Das oben genannte Verbesserungspotenzials an aktiver Nfz Sicherheit
in einer Größenordnung von 40% haben Fahrdynamikuntersuchungen ergeben.
Beispiel:
Bei einer Autobahnausfahrt, die ein verantwortungsvoller Fahrer mit
höchstens 45 km/h nehmen würde, wurde ohne ESP als Kippgrenzgeschwindigkeit 54
km/h gemessen.

Beim Ausweichmanöver vor unerwartet auftauchendes Hindernis fielen die
Unterschiede noch deutlicher aus. Hier hätte sich der Tanksattel ohne ESP bereits
bei 44 km/h Ausgangstempo auf die Seite gelegt, während er ESP- gesichert erst
bei einer um 48% höheren Geschwindigkeit (65 km/h) an diese Grenze geriet.
Die beiden Übungen erkannte die ESP Sensorik- genauer gesagt die “Roll-
over- Prevention ROP”, ein nutzfahrzeugspezifisches ESP- Feature, über das die
bekannte Pkw- Systeme nicht verfügen.
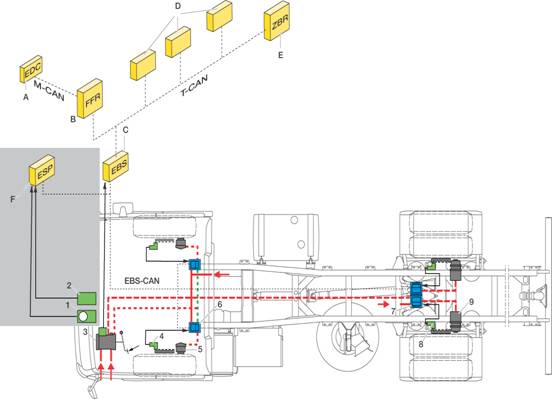
Das elektronische Stabilitätsprogramm ESP basiert auf dem elektronischen
Bremssystem EBS. Es hilft dem Fahrer durch gezielte Bremseingriffe bei der Entschärfung kritischer
Fahrsituationen.
Zusätzlich zum normalen EBS- Bauteilumfang ist beim ESP ein zweites
Steuergerät am internen CAN- Bus des Bremssystems angebunden. Dieses
Steuergerät hat die Aufgabe, anhand der eingehenden Sensorsignale kritische
Fahrsituationen wie Über- oder Untersteuern bzw. drohendes Umkippen zu
erkennen. Daraufhin gibt es anhand einprogrammierten Kennfelder entsprechende
Signale an die Druckregelmodule, welche ihrerseits die anliegenden
Radbremszylinder individuell mit Luftdruck beaufschlagen und Bremseingriffe
herbeiführen.
Dem Steuergerät ESP stehen für seine Aufgabe die Signale von zwei
zusätzlichen Sensoren zur Verfügung.
Ein Drehwinkelsensor (1) an der Lenksäule erfasst die Lenkbewegungen des
Fahrers. Der Drehraten- und Querbeschleunigungssensor (2) nimmt darüber hinaus
die aus der Fahrzeugbewegung resultierende Drehgeschwindigkeit sowie die quer
zur Fahrtrichtung wirkende Beschleunigung auf.
Elektronisches Stabilitätsprogramm ESP
1 Drehwinkelsensor Lenksäule
2 Drehraten- und Querbeschleunigungssensor
F Steuergerät
Funktionsumfang des ESP
Das elektronische Stabilitätsprogramm ESP umfasst die beiden Systeme DSP
(dynamisches Stabilitätsprogramm) und ROP (Umkippschutz).
Folgende Größen werden dazu ständig gemessen und zusammen mit der
momen-tanen Fahrgeschwindigkeit zur Beurteilung des Fahrzustandes herangezogen.
8 Lenkwinkel
8 Querbeschleunigung
8 Gierrate
Dynamisches
Stabilitätsprogramm DSP
Das DSP sorgt hauptsächlich bei niedrigem Reibwert (z. B. Nässe oder auf
Eis und Schnee) für die Stabilisierung des Fahrzeugs. Es greift grundsätzlich
nur dann ein, wenn zwischen der vom Fahrer gewünschten Fahrtrichtung und der
tatsächlichen Fahrzeugbewegung ein merkbarer Unterschied.
Differenzen zwischen den erwarteten und gemessenen Größen führen zu
einem Eingriff. Bei über- oder untersteuerndem Fahrzeug sorgt das System für
ausgleichende Kräfte und Drehmomente- und zwar durch gezieltes Bremsen
einzelner Räder. Dies soll das Fahrzeug wieder in einen unkritischen Fahrzustand
bringen. Das Fahrzeug soll so stabilisiert und wieder beherrschbar werden.
Ausgleichsbremsung beim Untersteuern des Zugfahrzeugs mit DSP.
A Das Bremsen des kurveninneren
Hinterrades erzeugt ein Moment, welches das
Fahrzeug in die Spur zwingt.
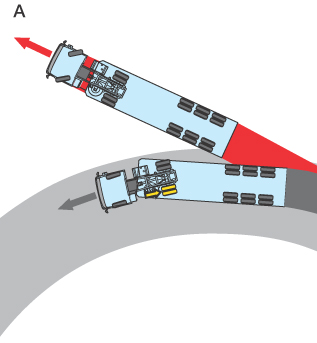
Bei “untersteuerndem Fahrzeug” wird das kurveninnere Hinterrad
angebremst, bei “übersteuerndem” das kurvenäußere Vorderrad. Dadurch entstehen
Korri-gierende Giermomente, die die Fahrzeugbewegung dem Fahrerwunsch
angleicht. Im übersteuerndem fall wird zusätzlich der Anhänger zur Streckung
des Zuges gebremst.
Bei “Untersteuern” dreht sich das Fahrzeug langsamer als es dem
Lenkeinschlag und damit dem Kurvenverlauf entspricht. Das Fahrzeug “schiebt”
über die stark eingeschlagenen Vorderräder in Richtung kurvenaußen (typisches
Verhalten eines Fahrzeugs mit Frontantrieb).
Ausgleichsbremsung beim Übersteuern des Zugfahrzeugs mit DSP
B Das Bremsen des kurvenäußeren Vorderrades erzeugt ein
dem Übersteuern gegen wirkendes
Moment. Das zusätzliche Bremsen der Aufliegerräder
strekt den Zug.

Ein “übersteuerndes” Fahrzeug dreht sich schneller als gewünscht, meist
hervorgerufen durch ein quer “driftendes” Heck (typisches Verhalten eines Pkw
mit Heckantrieb). Diese zu langsame oder zu schnelle Fahrzeugdrehung korrigiert
DSP mit gezielten, automatisch eingeleiteten Bremseingriffen an einem oder
mehreren Rädern in kürzester Zeit. Dabei ist unerheblich, ob der Fahrer in
diesem Moment bremst oder nicht.
Umkippschutz ROP
Das elektronische
System ROP (Rollover Prevention) reduziert die Kippgefahr bei hohem Reibwert
auf trockener Fahrbahn. Der Funktionsumfang des ROP setzt sich wiederum aus
zwei Bausteinen zusammen.
8 Das ROP- System errechnet
abhängig von der jeweiligen Fahrgeschwindigkeit
und anderen Eingangsgrößen die zuläs- sige
Querbeschleunigung des Fahrzeugs. Liegt der Wert der gemessenen
Querbeschleunigung über dem zulässigen Wert, muss
die Geschwindigkeit verringert werden, um das kippen zu verhindern. Das erreicht durch
Reduzieren des Motor- drehmoments
bzw. des gesamten Zuges.
8 Im zweiten Teil der ROP-
Funktion wird aus den vorliegen- den
Raddrehzahlen ermittelt, ob bereits ein kurveninneres Rad von der Straße abgehoben hat. Für
das Zugfahrzeug wird
dies im ESP- Steuergerät durchgeführt, für EBS- ausge- rüstete Anhänger in dessen Steuergerät.
Bei Anhängern ohne EBS beschränkt sich die ROP auf den im ersten teil
beschriebenen Funktionsumfang.
Sicherheitssysteme für Busse
Der Omnibus ist nachweislich das sicherste Personenbeförderungsmittel.
Trotzdem kann auch ein vorsichtiger Busfahrer in Situationen geraten, die
schwer beherrschbar sind. Für diese Fälle gibt es mit der Fahrdynamikregelung
FDR und dem Bremsassistent BA zwei neue Sicherheitssysteme.
Fahrdynamik Regelung FDR
Die Fahrdynamik- Regelung FDR trägt zur Reduzierung der Schleudergefahr
bei Kurvenfahrten oder Ausweichmanövern. Dazu werden in kritischen Situationen
die Bremskräfte an jedem einzelnen rad gezielt geregelt, beispielsweise wenn
der Omnibus in Kurvenfahrten im Grenzbereich liegt.
Zudem wird gleichzeitig die Motorleistung zurückgenommen. Das mögliche
“Ausbrechen” des Busses wird so durch das fein dosierte Abbremsen des Fahrzeugs
im Rahmen der physikalischen Möglichkeiten verhindert. FDR greift in
Situationen ein, die auch von geübten Fahrern nicht mehr beherrscht werden
können. Die Reaktionszeit der FDR ist deutlich kürzer als die selbst eines
Profis.
Die Schnelligkeit ist ein großer Vorteil des Systems. Die Erfassung des
Eigenlenkverhaltens sowie der automatische Bremseneingriff passieren innerhalb
weniger Sekundenbruchteile: Drängt das Fahrzeug zum Beispiel bei schneller
Kurvenfahrt mit der Hinterachse stark nach außen, bremst die FDR das
kurvenäußere Vorderrad so lange gezielt ab, bis sich die Schleuderbewegung
reduziert.
Die Bremskraft wirkt dabei der kritischen Drehbewegung entgegen und
stabilisiert somit das Fahrzeug. Gleichzeitig wird die Seitenführungskraft an
der Antriebsachse durch gezielte Beeinflussung der Motorleistung erhöht.
Vergleichbar ist die FDR mit dem ESP, jedoch mit erweiterten Funktionen.
Dazu zählt unter anderem die permanente Auswertung der in der FDR und im
elektronischen EBS verfügbaren Daten, damit die Fahrstabilität des Busses
innerhalb des physikalischen Grenzen sichergestellt sind.
Stichwort physikalische Grenzen
Natürlich kann auch dieses System die Physik nicht überlisten. Deshalb
muss ein Omnibus mit FDR stets genauso umsichtig und vorsichtig gefahren werden
wie bisher gewohnt. Das System wird jedoch dazu beitragen, Unfälle zu
verhindern oder deren Folgen zu mildern. Die FDR und der BA sind ein wichtiger
Schritt zu mehr Sicherheit.
Bremsassistent BA
Beim Bremsassistent BA handelt es sich um eine Zusatzfunktion, die in
das elektronisch gesteuerte Bremssystem integriert ist, welche zur Einregelung
des maximalen Bremsdrucks und damit zur Verkürzung des Bremsweges in
Notsituation dient.
Wenn ein Fahrer bei einer Notbremsung das Bremspedal nur anfangs sehr
schnell betätigt, das Bremspedal aber anschließend nur zögerlich durchtritt,
geht wertvoller Bremsweg verloren. Dieser verloren gegangene Bremsweg kann im
Laufe der Bremsung nicht mehr eingeholt werden, vielleicht fehlen am Ende des
Bremsweges genau jene 5m, die dadurch anfangs verschenkt worden sind.
Genau dieser Verlust des Bremsweges ist durch den BA vermeidbar.
Der Bremsassistent erkennt eine Notbremsung an der Geschwindigkeit, mit
der das Bremspedal im ersten Drittel des Pedalweges betätigt wird. Unmittelbar
in diesem Moment steuert der BA den vollen Bremsdruck ein und hält diesen bis
zum Stillstand des Fahrzeugs.
Wird das Bremspedal durch den Fahrer allerdings wieder gelöst oder nicht
mehr weiter als 1/3 betätigt, vermindert der BA den Bremsdruck, den der Fahrer
für richtig hält.
Der Bremsassistent führt zu einer Reduzierung des Bremsweges von bis zu
10%. Bei einer Bremsung aus 100 km/h kann sich der Bremsweg somit um bis zu
einer halben Buslänge verringern.